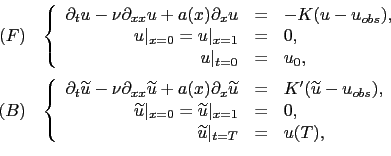
We first consider a linear viscous transport equation.
Then, the following result holds true for linear viscous transport equations [29]:
This result shows that, when applied to linear viscous transport equations, the BFN algorithm converges if the feedback acts on the entire domain. For instance, in the first point of theorem 3.3, equation (3.28) shows that the error has been decreased by a factor of
![]() during one iteration. Thus, the error decreases by a factor of
during one iteration. Thus, the error decreases by a factor of
![]() during
during ![]() iterations. As
iterations. As ![]() (or
(or ![]() ) and
) and ![]() , this clearly proves the convergence of the BFN algorithm in this case. On the contrary, if a part of the space domain is not observed (i.e. the support of
, this clearly proves the convergence of the BFN algorithm in this case. On the contrary, if a part of the space domain is not observed (i.e. the support of ![]() does not cover the entire domain), then the algorithm does not converge as the diffusion term cannot be controlled and the backward resolution is ill-posed.
does not cover the entire domain), then the algorithm does not converge as the diffusion term cannot be controlled and the backward resolution is ill-posed.