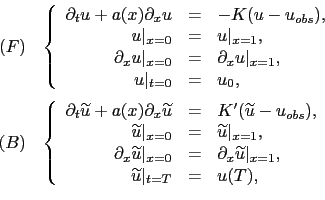
On considère désormais le cas non visqueux des équations de transport linéaire. Les équations du BFN sont:
On en déduit que dans le cas où le terme de rappel agit sur tout le domaine (cas ![]() et
et ![]() du théorème précédent), l'algorithme BFN converge pour les équations de transport linéaire non visqueux. De plus, dans le cas où le support de
du théorème précédent), l'algorithme BFN converge pour les équations de transport linéaire non visqueux. De plus, dans le cas où le support de ![]() ne recouvre pas tout le domaine (cas
ne recouvre pas tout le domaine (cas ![]() , par exemple lorsque les observations sont partielles), l'algorithme converge dès que toutes les courbes caractéristiques rencontrent le support de
, par exemple lorsque les observations sont partielles), l'algorithme converge dès que toutes les courbes caractéristiques rencontrent le support de ![]() , ce qui est par exemple garanti par l'observabilité du système (voir les remarques après la proposition 3.2 ci-dessous).
, ce qui est par exemple garanti par l'observabilité du système (voir les remarques après la proposition 3.2 ci-dessous).