



suivant: Gradient
monter: Algorithme 4D-VAR
précédent: Fonction coût
Table des matières
Afin de minimiser la fonction coût
 , il est nécessaire de
connaître son gradient
, il est nécessaire de
connaître son gradient
 . Comme la dimension du vecteur
de contrôle est trop élevée pour calculer la dérivée par une
méthode de différences finies, nous allons utiliser la méthode
de l'adjoint. Il faut alors résoudre le modèle adjoint de façon
rétrograde. Les équations adjointes du modèle
quasi-géostrophiques sont :
. Comme la dimension du vecteur
de contrôle est trop élevée pour calculer la dérivée par une
méthode de différences finies, nous allons utiliser la méthode
de l'adjoint. Il faut alors résoudre le modèle adjoint de façon
rétrograde. Les équations adjointes du modèle
quasi-géostrophiques sont :
- pour la couche de surface (
 ) :
) :
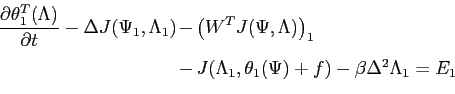 |
(5.12) |
- pour les couches intermédiaires (
 ) :
) :
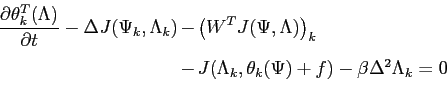 |
(5.13) |
- pour la couche du fond (
 ) :
) :
 |
(5.14) |
Les notations utilisées sont les suivantes :
Si on note
 le vecteur modal adjoint :
le vecteur modal adjoint :
 |
(5.16) |
les conditions aux bords que doit satisfaire l'état adjoint  sont :
sont :
![\begin{displaymath}\begin{array}{l} \chi_1 = 0 \qquad \textrm{sur } \partial \Om...
...ma = 0 \qquad \forall t \in [0,T], \forall k \ge 2, \end{array}\end{displaymath}](img590.png) |
(5.17) |
et
![$\displaystyle \Delta \Lambda_k(t)=0 \qquad \textrm{sur } \partial \Omega\times [0,T], \forall k.$](img591.png) |
(5.18) |
suivant: Gradient
monter: Algorithme 4D-VAR
précédent: Fonction coût
Table des matières
Retour à la page principale
 .
. 